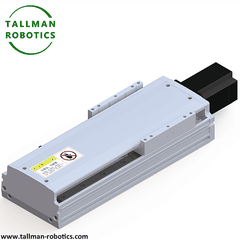






Actuador lineal modular, també anomenat robot d'eix únic, mòdul de moviment lineal, moviment lineal industrial, etc. Com a fabricant professional d'actuador lineal modular, TallMan Robotics ofereix una àmplia gamma de mòduls lineals TM, inclosos mòduls lineals d'accionament de cargol i corretja per diferents solucions accionades, també mòduls lineals semitancats i totalment tancats per a diversos entorns d'aplicació.
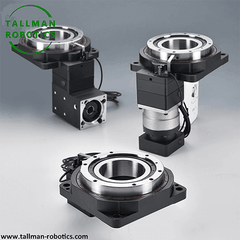
L'actuador lineal modular s'integra amb una àmplia gamma de motors de marca amb motors pas a pas de 50W, 100W, 200W/400W /750W/1000W o 42, 57,86 o motors pas a pas NMEA17, NMEA23, NMEA34 en el perfil de base extrusionat i els requisits de velocitat de precisió i els requisits comuns de l'aplicació de precisió i el moviment. El fre i sense fre poden ser opcionals.
L'actuador lineal modular TM del tipus TM45 amb cos amb per 45 mm té 4 sèries en accionament de cargol semi tancat, accionament de cargol totalment tancat i accionament de corretja semi tancat, transmissió de corretja totalment tancat. Aquests actuadors lineals modulars tenen carreres de 0 mm a 800 mm i càrrega útil d'1 kg a 10 kg.
Es podria aplicar a la classificació de peces a la posició especificada, la càrrega automàtica-després de la inspecció visual CCD, la recollida de peces de bols vibrants, la pressió de la peça de treball al forat, el muntatge de peces, l'operació d'injecció de tinta, etc.
Aquí, en aquesta pàgina, presentem les especificacions bàsiques de la sèrie TM45 de la següent manera:
|
Model núm |
TMS45-CM/TMS45-CR |
TMB45-CM/TMB45-CR |
||||
|
Solució d'accionament |
Cargol de bola |
Corretja de distribució |
||||
|
Segellat o no |
Semi tancat/Tot tancat |
Semi tancat/ Totalment tancat |
||||
|
Potència del motor |
50/100W |
50/100W |
||||
|
Repetibilitat |
±0.01/±0.005 |
±0.04 |
||||
|
Cargol de boles de diàmetre exterior |
12 mm |
Relació de reducció: 1:1 |
||||
|
plom |
5 mm |
10 mm |
66 |
|||
|
Velocitat més ràpida Velocitat del motor 3000 (rpm) |
250 |
500 |
3300 |
|||
|
Càrrega màxima (kgs) |
Acceleració Desacceleració |
Horitzontal |
0.3G |
5/10 |
2.5/5 |
2/4 |
|
Vertical |
0.3G |
1.5/3 |
1/1.5 |
|||
|
Velocitat d'impuls (N) |
181/322 |
80/161 |
15/30 |
|||
|
Guia lineal |
24*8.5-1 |
24*8.5-1 |
||||
|
Sensor d'origen: connecteu- |
EE-SX674(NPN)EE-SX674P(PNP) |
|||||
Us convidem a veure més projectes o visitar la nostra galeria de vídeos de Youtube: https://www.youtube.com/@tallmanrobotics








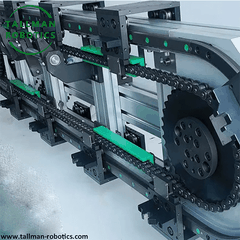
Amb quin tipus d'aplicació es pot utilitzarActuador lineal modular? Mostra d'aplicació:

Coneixements relacionats: quan necessiteu un mòdul lineal amb una estructura de pòrtic?
Què penses quan penses en un robot industrial? Podria ser així...

Aquests robots articulats són àmpliament reconeguts a causa dels anuncis comercials i les seqüències de ball de robots de les empreses d'automòbils. Els robots SCARA (Selectively Compliant Articulated Robotic Arm) també han estat àmpliament reconeguts per la seva aplicació i proliferació a les fàbriques des de principis dels anys vuitanta. Els dos-robots articulats i SCARA-combinen moviment lineal i rotatiu, proporcionant així maniobrabilitat per a tasques complexes. Els robots articulats són semblants als braços humans, amb sis eixos de moviment-tres translacions (lineals) i tres rotacions (imagina't les espatlles, els colzes i els canells). El robot SCARA té quatre eixos de moviment-X, Y, Z i theta (una mica com el teu braç si tens l'espatlla fixa).
No és popular a la cultura popular, però les aplicacions industrials que van des d'envasos fins a la fabricació de semiconductors són robots cartesians. Com el seu nom indica, aquests robots treballen en tres eixos cartesianes (mòduls lineals)-X, Y i Z-, tot i que poden incloure l'eix θ per a les eines d'extrem-braç. Encara que són més "sexys" que els robots articulats i SCARA, els robots cartesians són més versàtils, la seva mida té una capacitat de càrrega més gran i, en molts casos, una major precisió. També són altament adaptables perquè l'eix es pot actualitzar o canviar amb relativament poques reconfiguracions per adaptar-se als canvis en els requisits del producte o de l'aplicació.

Tanmateix, els robots cartesians estan limitats pel seu disseny en voladís inherent, que limita la seva capacitat de càrrega. Això és especialment cert quan el mòdul lineal de l'eix més exterior (Y o Z) té una llargada de carrera, la qual cosa genera una gran càrrega de moment a l'eix de suport. Quan es requereix una carrera llarga i una càrrega elevada, és una millor solució triar l'estructura de pòrtic per al mòdul lineal.

El mòdul lineal d'estructura de pòrtic té dos eixos X, un eix Y i un eix Z.
De Descartes a la Porta del Drac
El robot pòrtic és una versió millorada del robot cartesià, que utilitza dos eixos X (o base) en lloc d'un únic eix base al sistema de coordenades cartesianes. L'eix X-addicional (de vegades l'eix Y-i l'eix Z- addicionals permeten que el robot pugui gestionar) més càrregues i forces, el que el fa ideal per recollir i col·locar càrregues pesades o manipular peces. Cada eix es basa en un mòdul lineal, la qual cosa significa que opcions gairebé il·limitades permeten qualsevol combinació d'alta velocitat, recorregut llarg, càrrega pesada i alta precisió de posicionament. S'incorporen fàcilment requisits especials per a ambients durs o baix soroll, si l'aplicació requereix processos simultanis però independents,
Els robots de pòrtic solen instal·lar-se a la zona de treball, però si les peces no són aptes per processar-les des de dalt, com en el cas de les cèl·lules i mòduls solars, el pòrtic es pot configurar per treballar des de sota de les peces. Encara que els robots de pòrtic es consideren generalment sistemes molt grans, també són adequats per a màquines més petites, fins i tot de mida d'escriptori-.
Dos eixos són millor que un
Com que l'estructura del pòrtic del mòdul lineal té dos eixos X-o base, la càrrega de moment i la càrrega útil de treball presentades per l'eix Y-i l'eix Z-s'interpretaran com la força sobre l'eix X-. Això augmenta significativament la rigidesa del sistema i, en la majoria dels casos, permet que l'eix tingui una longitud de carrera més llarga i una velocitat més alta que un robot cartesià similar.
Tot i que els robots articulats i SCARA són fàcils d'identificar i els robots Descartes estan àmpliament desplegats, el disseny del mòdul lineal de pòrtic supera les seves limitacions inherents en termes de càrrega, velocitat, abast i repetibilitat, amb una personalització i flexibilitat especials.
Oferim una estructura de mòdul lineal que es pot muntar en moltes configuracions diferents; per exemple, etapa XY, etapa XYZ. Podeu triar la vostra pròpia sèrie, cursa i combinació de pas del cargol a cada eix per construir l'escenari que necessiteu.
Etiquetes populars: actuador lineal modular, fabricants d'actuador lineal modular de la Xina, proveïdors, fàbrica




