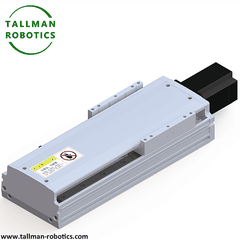







L'etapa de traducció lineal motoritzada és un dispositiu que pot aconseguir un desplaçament ajustable i d'alta{0}}precisió en la direcció lineal. S'utilitza àmpliament en la investigació científica, la fabricació industrial, la medicina i altres camps, proporcionant suport de control de posició crítica per a diverses operacions de precisió.
L'etapa de traducció lineal motoritzada utilitza un motor com a font d'alimentació principal, i els tipus de motors habituals inclouen motors pas a pas, servomotors i motors de corrent continu. El motor genera moviment de rotació, que es converteix en moviment lineal mitjançant dispositius de transmissió com ara cargols i corretges síncrones. Prenent com a exemple l'accionament del cargol, el motor fa girar el cargol i la femella del cargol està connectada al control lliscant de la taula de desplaçament. El moviment de la femella del cargol fa que el control lliscant es mogui en línia recta al llarg del rail guia. Al mateix temps, l'equip està equipat amb components de retroalimentació de posició com regles de reixeta, codificadors, etc. Supervisen la posició del control lliscant en temps real i proporcionen retroalimentació al sistema de control. El sistema de control compara el senyal de retroalimentació amb la posició objectiu preestablerta i ajusta automàticament l'estat de funcionament del motor per aconseguir un control precís de la posició.
L'etapa de traducció lineal motoritzada és una plataforma de moviment avançada que integra profundament estructures mecàniques de precisió amb unitats de control i accionament del motor, permetent el control remot, la programació automatitzada i el posicionament lineal d'ultra-precisió. Representa l'evolució definitiva de les taules d'ajust manual, alliberant completament els humans d'operacions d'ajustament-tedioses, repetitives i molt exigents. És un component clau bàsic per aconseguir l'automatització i la intel·ligència en experiments de recerca científica moderns, proves industrials i fabricació-de gamma alta.
El valor fonamental de l'etapa de traducció lineal motoritzada rau en les seves característiques "elèctriques" i "controlables". Integra mecanismes de transmissió d'alta-precisió (com ara cargols de boles, cargols de rodets planetaris o motors lineals), sistemes de guia d'alta rigidesa (com guies lineals o coixinets de rodets creuats), motors d'accionament d'alt-rendiment (generalment servomotors o motors pas a pas) i controladors i interfícies integrats. Els usuaris poden enviar instruccions mitjançant programari informàtic, controladors de mà o PLC externs sense tocar la plataforma mateixa, controlant amb precisió la posició de moviment, la velocitat, l'acceleració de la plataforma i fins i tot aconseguint un enllaç complex de diversos eixos i un moviment seqüencial.

|
Model núm |
TMK150-CM /TMK150-CR |
TMK200-CM /TMK200-CR |
TMK300-CM/ TMK300-CR |
|
|
Solució d'accionament |
Cargol de bola |
|||
|
Segellat o no |
Semi tancat / Totalment tancat |
Semi tancat / Totalment tancat |
Semi tancat / Totalment tancat |
|
|
Potència del motor |
400W |
750W |
750W |
|
|
Repetibilitat |
P7: ±0.01/P5: ±0.005 |
|||
|
plom |
5/10/16/20 |
5/10/20 |
5/10/20/32 |
|
|
Velocitat més ràpida/Velocitat del motor 3000 (rpm) |
250/500/800/1000 |
250/500/1000 |
250/500/1000/1600 |
|
|
Càrrega màxima (kg) |
Horitzontal |
120/58/35/27 |
280/150/75 |
385/220/105/63 |
|
Vertical |
53/24/12/- |
95/43/16 |
92142/13/- |
|
|
Velocitat d'impuls (N) |
12761638/398/319 |
2100/1190/603 |
2100/1190/603/375 |
|
|
Ictus efectiu |
0-1204 |
0-1244 |
0-1664 |
|
|
Observació: |
Si supereu l'itinerari vàlid, consulteu primer el personal tècnic de l'empresa. Classificació de la sala neta: Classe ISO 5 a 6 (100 a 1000) |
|||

Us convidem a veure més projectes o visitar la nostra galeria de vídeos de Youtube: https://www.youtube.com/@tallmanrobotics








Camps d'aplicació de l'etapa de traducció lineal motoritzada:
Fabricació de semiconductors: s'utilitza en equips com ara màquines de litografia, màquines de gravat, màquines d'unió d'encenalls, etc., per aconseguir una alineació d'alta-precisió d'hòsties, recobriment fotoresistent, envasat d'encenalls i altres passos del procés, garantint una alta precisió i un alt rendiment en la fabricació d'encenalls.
Biomèdica: en els sistemes d'enfocament automàtic de microscopis, operadors de microscòpia cel·lular i equips de seqüenciació de gens, s'aconsegueix un moviment i un posicionament precís de les mostres per ajudar a l'observació, manipulació i anàlisi de gens a nivell cel·lular en investigació científica i treball mèdic.
Enginyeria òptica: ajustar amb precisió la posició dels components òptics en equips de detecció òptica, sistemes d'alineació de fibres i equips de processament làser per garantir camins òptics precisos i sense errors, aconseguint una detecció òptica d'alta-qualitat, connexions de components de comunicació òptica i processament de precisió làser.
Experiments d'investigació: en els camps de la ciència dels materials, la nanotecnologia i altres àrees d'investigació científica, proporcioneu un desplaçament precís per a microscopis de sonda d'escaneig, microscopis de força atòmica i altres equips per ajudar els investigadors a dur a terme-investigació d'avantguarda, com ara l'anàlisi de propietats dels materials i la preparació de nanoestructures a microescala.
Etiquetes populars: Etapa de traducció lineal motoritzada, fabricants d'etapa de traducció lineal motoritzada de la Xina, proveïdors, fàbrica



