





L’actuador lineal de pas és un dispositiu d’accionament lineal de control de bucle obert - que s’acosta directament a un motor pas a pas amb un mecanisme de transmissió lineal i aconsegueix un moviment de posició discreta mitjançant el control del senyal de pols. Un actuador lineal pas a pas és un dispositiu electromecànic que converteix els senyals de pols elèctrics en desplaçament lineal precís, combinant les característiques de conducció de pols d’un motor pas a pas amb la capacitat de sortida de moviment lineal. S’utilitza àmpliament en escenaris que requereixen un posicionament precís, però no requereixen un control de bucle - alt tancat.
Les característiques bàsiques de l’actuador lineal pas a pas són una estructura simple, un baix cost i un posicionament sense comentaris, adequats per a escenaris d’automatització amb precisió baixa a mitjana i càrrega baixa a mitjana, com ara impressió 3D, equips mèdics, envasos automatitzats, etc.
ElPrincipi de treballdeL’actuador lineal pas a pas es basa en el pas - per - Característiques de rotació del pas dels motors de pas:
El controlador envia senyals de pols per conduir el motor pas a pas per girar pas a pas en un angle fix (com ara 1,8 graus /pas) i, a continuació, converteix el moviment de rotació en desplaçament lineal mitjançant mecanismes de transmissió com cargols i engranatges. Per a cada pols d’entrada, l’actuador mou una distància de pas fixa (normalment en micròmetres), i el desplaçament és proporcional al nombre de polsos. Pot aconseguir un control precís del bucle obert - sense sensors de retroalimentació i té una estructura relativament senzilla.
Estructuralment, un actuador lineal pas a pas es compon principalment de tres parts:
Una unitat de conducció (motor pas a pas i circuit de conducció), un component de transmissió (cargol de bola o cargol trapezoïdal, responsable de convertir la rotació en moviment lineal) i un sistema de guia (coixinets lineals o rails de guia, assegurant un moviment suau). Alguns models integren els interruptors de límit per evitar el funcionament de sobretracta i simplificar el disseny del sistema.
L’aplicació està centrada en escenaris de posicionament de precisió de baixa o mitjana:
Feed de boquilla per a impressores 3D, unitat de taula de treball per a petites màquines -eines CNC, transferència de mostres per a equips d’automatització de laboratori, control de dosis per a dispositius mèdics (com ara bombes d’infusió), focalització de lents per a equips de seguretat, etc. Els seus avantatges es troben en el seu cost inferior en comparació amb els sistemes de servo, control senzill, sense necessitat de complexos de velocitat tancat - i no vibracions durant una bona operació de velocitat. L’actuador lineal pas a pas és adequat per a escenaris de moviment intermitents amb càrregues de llum i alta repetibilitat. La precisió del pas normalment pot arribar a ± 0,01 mm, satisfer les necessitats dels equips d’automatització de mida més petita i mitjana {7 {7}.
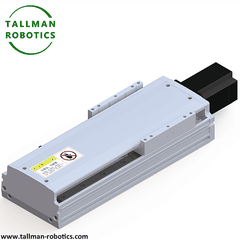
Aquí introduïm la Guia Rail Built - en el mòdul lineal, TMTH8 de la següent manera:
Us convidem a veure més projectes o visitar la nostra galeria de vídeos per YouTube: https://www.youtube.com/@tallmanrobotics
|
Model No |
Motor Potència (W) |
Amplada del cos (mm) |
Repetibilitat (mm) |
Rodó de cargol de bola (C7) |
Càrrega màxima (kgs) |
Cop (mm) a Velocitat màxima (mm/s) |
Velocitat (mm/s) a mà màxima (mm) |
Classificat Empenta |
||
|
Fora de dia (mm) |
Plom (mm) |
Horitzontal |
Vertical |
|||||||
|
Tmth8 |
100W |
82 |
±0.01 ±0.005 |
16 |
5 |
30 |
10 |
750mm a 250mm/s |
75mm/s a 1100mm |
341 |
|
10 |
15 |
5 |
750mm a 500mm/s |
150mm/s a 1100mm |
170 |
|||||
|
20 |
10 |
2.5 |
750mm a 1000mm/s |
300mm/s a 1100mm |
85 |
|||||
|
200W |
5 |
50 |
15 |
750mm a 250mm/s |
75mm/s a 1100mm |
682 |
||||
|
10 |
30 |
8 |
750mm a 500mm/s |
150mm/s a 1100mm |
340 |
|||||
|
20 |
18 |
3 |
750mm a 1000mm/s |
300mm/s a 1100mm |
170 |
|||||
|
400W |
5 |
50 |
15 |
750mm a 250mm/s |
75mm/s a 1100mm |
1353 |
||||
|
10 |
40 |
12 |
750mm a 500mm/s |
150mm/s a 1100mm |
674 |
|||||
|
20 |
22 |
5 |
750mm a 1000mm/s |
300mm/s a 1100mm |
337 |
|||||









Hi ha diferències significatives entre els actuadors lineals del motor pas a pas i els actuadors lineals del servo motor en termes de mètodes de control, característiques de rendiment i escenaris aplicables. Les diferències específiques són les següents:
1. Diferents principis de control
Actuador de motors pas a pas lineal: Adopta Open - Control de bucle, condueix el motor a girar (o moure en línia recta) a una distància de pas fixa rebent senyals de pols i el desplaçament correspon estrictament al nombre de polsos, sense necessitat de sensors de retroalimentació de posició. Sempre que el senyal de pols sigui exacte, es pot aconseguir el moviment preestablert, però no pot intuir si la posició real es desvia de la instrucció.
Actuador lineal de servo motor: adopta el control de bucle tancat -, integra sensors de posició (com ara la regla de la regió, el codificador) i alimenta la posició real i la velocitat al controlador en temps real. El controlador compara el valor de la comanda amb el valor de retroalimentació, ajusta dinàmicament la sortida per assegurar la precisió del moviment i pot corregir les desviacions causades pels canvis de càrrega i els errors mecànics.
2. Diferents capacitats de manipulació de precisió i errors
Actuador del motor de pas lineal: la precisió depèn de la consistència de l’angle de pas (o pas lineal), sense capacitat de correcció d’errors. Si la càrrega és massa gran i la freqüència de pols és massa alta, pot haver -hi una pèrdua de pas (el desplaçament real és inferior al desplaçament comandat) i s’acumularan errors. La precisió del pas sol ser de ± 0,01 mm de 0,1 mm.
Actuador de servo lineal del servo: Error en temps real Correcció a través de tancament - Feedback del bucle, forta anti - capacitat d’interferència, major precisió de repetibilitat (fins a ± 0,001 mm de 0,01 mm), fins i tot si hi ha fluctuació de càrrega o interferències externes, es pot restablir a la posició comandada mitjançant ajustament sense error de carburació.
3. Diferent velocitat i resposta dinàmica
Actuador del motor pas a pas lineal: Low - rendiment de velocitat, però propens a la vibració i la pèrdua de pas durant el funcionament de la velocitat - i el parell de sortida disminueix amb la velocitat creixent (hi ha un risc de "pèrdua de pas"), adequat per a baix {{2 {2} de velocitat i escenaris de moviment intermitents.
Actuador lineal del motor de servo: amb resposta ràpida de velocitat - i tancat - Control de bucle, pot mantenir una sortida estable en un ampli rang de velocitat. Els processos d’acceleració i desacceleració són més suaus, cosa que el fa adequat per a escenaris que requereixen una parada d’inici ràpid o un moviment de velocitat continuat -.
4. Capacitat de càrrega i característiques de parell diferents
Actuador del motor de pas lineal: el parell de sortida (o empenta) disminueix amb la velocitat creixent. A velocitats baixes, el parell és més gran, però a velocitats elevades, és propens a sobrecarregar -se amb càrregues pesades. És adequat per a càrregues de llum (normalment menys de 500N) i escenaris baixos d’inèrcia.
Control de bucle Lineal Servo Motor: mitjançant el control de bucle tancat -, la força de sortida es pot ajustar segons els canvis de càrrega. Té una velocitat més forta - i pesada - capacitats de treball i pot mantenir una empenta estable a velocitats elevades. És adequat per a escenaris amb càrregues de mitjana a alta (fins a milers de newtons) i una alta inèrcia.
5. Costos i complexitats diferents
Actuador del motor de pas lineal: estructura simple, sense necessitat de sensors de retroalimentació, circuit de control simplificat, baix cost (normalment 1/3 ~ 1/2 del sistema de servo), baixa dificultat de depuració, adequada per a equips de mida petita i mitjana {{4- amb un pressupost limitat.
Actuador lineal de servo -motor: requereix la integració de sensors i complexos tancats - algoritmes de control de bucles, que és costós, i la depuració del controlador (com la sintonia de paràmetres) és més complexa, fent -lo adequat per a equips de precisió amb requisits d’alt rendiment.
6. Diferents escenaris aplicables
Actuador del motor de pas lineal: adequat per a precisió baixa, càrrega de llum, baix - escenaris de moviment repetitius de velocitat, com ara alimentació de la boquilla de la impressora 3D, equips de transport reduït, posicionament en fase de mostra de laboratori, control de vàlvules d'aparells domèstics, etc.
Actuador lineal de servo motor: adequat per a escenaris de resposta dinàmica de velocitat -, alta càrrega, alta - escenaris de resposta dinàmica de velocitat, com ara manipulació de les hòsties de semiconductor, posicionament de tall làser, robots de precisió, equips quirúrgics mèdics, etc.
Taula de resum i comparació
|
Dimensió de comparació |
Actuador de motor pas a pas lineal |
Actuador lineal de servo -motor |
|
Mode de control |
Loop obert (sense comentaris) |
Bucle tancat (amb la posició de posició/velocitat) |
|
Precisió |
Medi (± 0,01 mm 0,1 mm), sense correcció |
Alta precisió (± 0,001 mm de 0,01 mm), corregible |
|
Velocitat i resposta |
Estable a velocitats baixes, fàcil de perdre passos a velocitats elevades |
Resposta ràpida a velocitats elevades, funcionament suau |
|
Capacitat de càrrega |
Càrrega de llum, disminució de la velocitat - |
Càrrega alta alta, estable alta - Torque de velocitat |
|
Costar |
Baix |
Alt |
|
Avantatges bàsics |
Control senzill, baix cost, baix - Vibració de velocitat lliure |
Alta precisió, forta interferència anti -, bon rendiment de velocitat High - |
Quan es selecciona, és necessari fer un judici complet en funció dels requisits de l’aplicació per a la precisió, la velocitat, la càrrega i el pressupost de costos: per a escenaris lleugers i simples, es prefereix el pas, mentre que es requereix una precisió - i escenaris dinàmics alts, servo.
Etiquetes populars: Actuador de pas lineal, Fabricants d’actuadors de pas lineals, proveïdors, fàbrica



