

")



L’actuador Hypoid Gear Hollow és un actuador rotatiu de precisió que integra un sistema de transmissió d’engranatges hipoides, un disseny d’estructures buides i una funció d’accionament de potència. S'utilitza principalment per convertir l'energia del motor en moviment de rotació controlable, mentre que compleix els requisits especials d'instal·lació o funcionals mitjançant una estructura central de buits. S'utilitza àmpliament en equips d'automatització, fabricació de precisió, tecnologia de robòtica i altres camps.
L’actuador Hypoid Gear Hollow és un dispositiu d’accionament rotatiu de precisió que combina la transmissió d’engranatges hipoides i el disseny de l’eix buit. S'utilitza principalment en escenaris d'automatització que requereixen un parell elevat, una alta rigidesa, una baixa retrocés i permeten roscar -se. La seva característica bàsica és utilitzar els avantatges de transmissió dels engranatges hipoides (càrrega alta, soroll baix), alhora que s’aconsegueix la connexió de cables, circuits d’aire o components mecànics mitjançant una estructura buida.
El disseny de l'actuador Hypoid Gear Hollow gira al voltant de tres elements bàsics: "transmissió eficient", "funció buida" i "control precís".
Les estructures típiques inclouen:
|
1 |
Tren d'engranatge hipoide |
1). Un engranatge hipoide és un tipus especial d’engranatges helicoïdals compost per un parell d’engranatges amb eixos no intersectats però perpendiculars (o angles) entre ells (normalment un pinyó de conducció i un engranatge impulsat). En comparació amb els engranatges helicoïdals ordinaris o els engranatges de cuc, la seva àrea de contacte dental és més gran, l'eficiència de transmissió és més alta (normalment un 85% -95%), pot transmetre un parell més gran i permet compensar (no collinear) entre l'eix d'entrada i l'eix de sortida, reduint les limitacions d'espai d'instal·lació. 2). Procés de transmissió: la potència del motor condueix l’engranatge hipoide actiu a través de l’eix d’entrada i, a continuació, es mou per conduir l’engranatge impulsat, transmetent finalment el moviment de rotació a la taula de sortida. Al mateix temps, s’aconsegueix l’amplificació de parell i l’ajust de la velocitat mitjançant relacions de reducció d’engranatges (com ara 10: 1, 50: 1). |
|
2 |
Disseny buit |
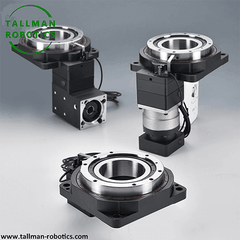
1). Un forat buit (amb un diàmetre que va des de desenes de mil·límetres fins a centenars de mil·límetres) es reserva al centre de l’actuador per a pipelines de fila a través del forat buit durant la detecció de rotació). 2). La presència de forats buits no afecta la rigidesa estructural general, i la tauleta encara es pot suportar per coixinets de precisió alts - (com els coixinets de corró creuat) per assegurar una rotació suau. |
|
3 |
Mòdul de conducció i control |
1). Nosaltres integrats amb Servo Motors (proporcionant potència), codificadors (retroalimentació de posició) i interfícies de controlador per formar un sistema de control de bucle tancat - que admet un posicionament precís (com dins de ± 0,1 graus) i l’ajust de velocitat. Alguns models són compatibles amb els motors pas a pas o els motors de corrent continu, adaptant -se a diferents requisits de precisió. |
Paràmetres tècnics clau (indicadors bàsics de selecció) deHypoid Gear Hollow Actuador
|
1 |
Paràmetres de transmissió |
1). Ràtio de reducció: determina el parell de sortida i la velocitat (proporció de reducció=velocitat/velocitat de sortida del motor=Parell de sortida/parell del motor, ignorant les pèrdues), que solen oscil·lar entre 5: 1 a 100: 1 i cal seleccionar -lo segons el parell de càrrega i els requisits de cicle. 2). Eficiència de transmissió: afecta directament el consum d’energia i la generació de calor. Per a escenaris de precisió alts -, s'hauria de prioritzar la selecció de models amb una eficiència superior o igual al 90%. |
|
2 |
Paràmetres de disseny buit |
1.) 2). Mida de la taula: el diàmetre o la longitud lateral necessita cobrir els requisits d’instal·lació de la peça i el dispositiu, i la superfície sol tenir t - solcs o forats roscats per a la fixació. |
|
3 |
Precisió i capacitat de càrrega |
1). Posició de precisió/Repetibilitat Precisió: indicador del nucli, detecció de precisió requereix menys o igual a ± 10 segons, i el conjunt industrial es pot relaxar a ± 1 minut. 2). Moment de càrrega axial/radial magnífic: Cal calcular -lo en funció del pes total de la peça i de l’excentricitat d’instal·lació per evitar el desgast o la degradació de precisió causada per la sobrecàrrega. |
|
4 |
Control i compatibilitat |
1). El tipus de motor (servo/pas), el mètode de retroalimentació (tipus de codificador) i la interfície de control (pols/bus/etherCAT) han de ser compatibles amb l’enllaç superior de l’ordinador o PLC i l’automatització de suport. |
Aquí en aquesta pàgina, introduïm sèries deHypoid Gear Hollow Plataformes Rotary, podeu veure la fitxa de dades, les imatges de producció, els vedios de la prova de la següent manera:
També us convidem a veure més projectes o visitar la nostra galeria de vídeos per YouTube: https://www.youtube.com/@tallmanrobotics

Embalatge i lliurament deTaules rotatives buides:








Producció deTaules rotatives buides:


En comparació amb altres actuadors rotatius impulsats per engranatges com els actuadors d’engranatges de cuc i les taules rotatives d’engranatges planetàries, els avantatges únics deHypoid Gear Hollow Actuadores reflecteixen a:
1.)
2). Compacte Estructura i flexibilitat d’instal·lació: l’eix d’entrada i l’eix de sortida estan dissenyats no col·lineals (es poden disposar verticalment o compensar), combinats amb la funció del forat buit, que es pot adaptar a dissenys d’equips complexos i reduir l’ocupació de l’espai.
3). Bireu el soroll i la llarga vida: la superfície de les dents de l’engranatge és un terreny de precisió, garantint un maldecap i un soroll de funcionament inferior que els engranatges helicoïdals ordinaris; I la distribució d’estrès de contacte a la superfície de les dents és uniforme, el desgast és petit i la vida útil és més llarga (normalment fins a 10000 hores o més).
4). Balançant la precisió i la capacitat de càrrega: mitjançant Servo tancat - Control del bucle, la precisió de posicionament pot arribar a ± 5 segons (model de precisió), alhora que pot suportar les càrregues axials/radials i els moments de sobrecàrrega, adequats per a requisits que van des de la inspecció de precisió lleugera fins a un mitjà -} muntatge industrial.
Escenaris d'aplicació típics deHypoid Gear Hollow Actuador:
Les plataformes Hypoid Gear Hollow s'utilitzen àmpliament a:
1). Muntatge d’automatització de la precisió: com ara rotar i alinear components electrònics, muntatge de diverses estacions de peces d’automòbils i cables de rosca a través de forats buits per reduir l’enredament de canonades.
2).
3). Juntes i plaques giratòries de Robot: petites articulacions rotatives de robot (utilitzant estructures compactes), pesades - Turles de treball (com el quart eix d’una màquina -eina), requereixen una sortida de parell elevada i eviteu la interferència de canonades.
4).
Hypoid Gear Hollow Actors és un equip d'execució industrial que integra una transmissió eficient d'engranatges hipoides, funcions pràctiques de les estructures buides i un control de servo precís. El seu valor bàsic rau en la resolució dels tres punts de dolor principals de "transmissió de càrrega pesada", "limitació d'espai" i "evitació de canonades". És un component clau per aconseguir el control de moviment de rotació en línies de producció automatitzades i equips d’inspecció de precisió. Quan es selecciona, és important centrar -se en la coincidència de la relació de transmissió, l’obertura buida, la capacitat de càrrega i els requisits de precisió, alhora que es fa atenció a la compatibilitat amb el sistema de control.
Etiquetes populars: Actuador Hypoid Gear Hollow, Fabricants d’actuadors de Hypoid Gear Hypoid, proveïdors, fàbrica



